欢迎访问
首页
新闻动态
研究动态
实验室概况
实验室简介
团队招生
博士后招聘
联系我们
科研团队
教授
副教授
兼职研究员
科学研究
研究方向
科研奖励
论文专著
科研项目与专利
学生培养
硕士研究生
博士研究生
毕业生去向
代表性成果
当前位置:
首页
>>
代表性成果
>> 正文
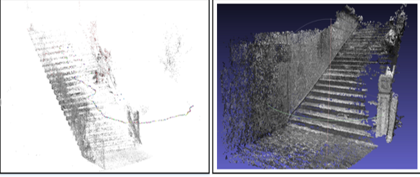
多视角点云重建
发布者:
[发表时间]:2024-07-11
[来源]:
[浏览次数]:
团队在**科技委项目的支持下,实现了跳跃机器人的实时3D路径导航。通过多视角点云重建,实现了实时性>5Hz的目标。